Info! Please, check our previous work on domain adaptation of virtual and real environments here.
Article
[row][column size=’col-md-4′ ]
 [/column]
[/column]
[column size=’col-md-8′ ]
Bibtex:
@inproceedings{RosCVPR16,
author={German Ros and Laura Sellart and Joanna Materzynska and David Vazquez and Antonio Lopez},
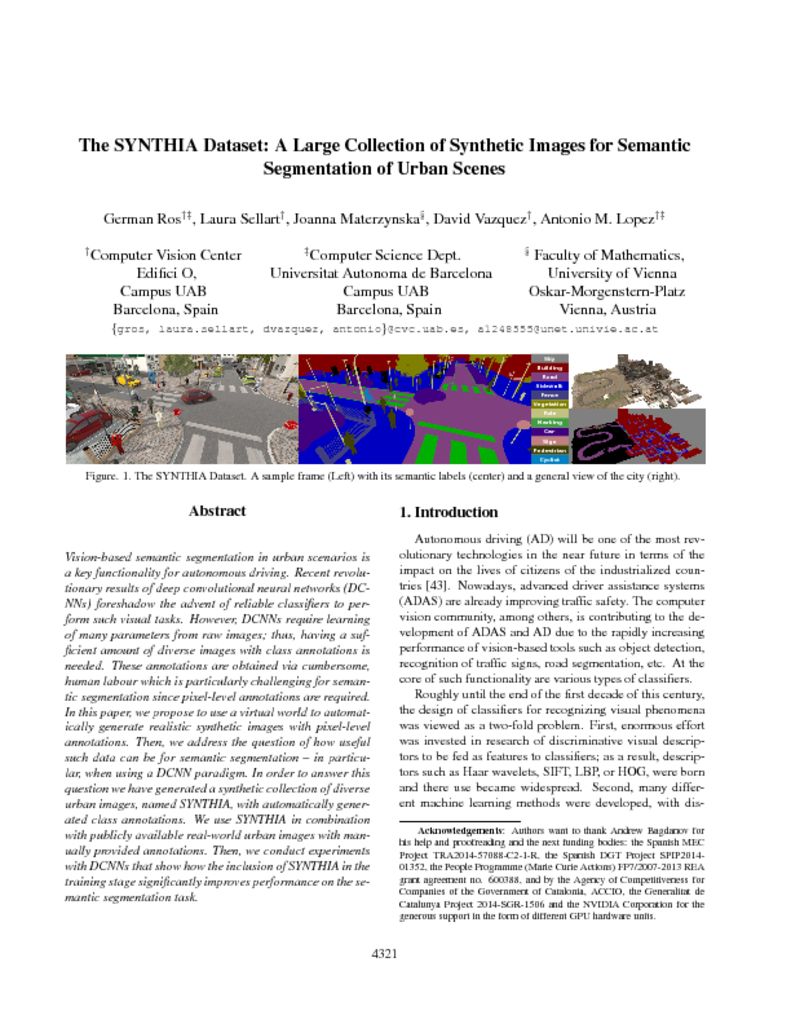
title={ {The SYNTHIA Dataset}: A Large Collection of Synthetic Images for Semantic Segmentation of Urban Scenes},
booktitle=CVPR,
year={2016}
}
[/column][/row]
[row][column size=’col-md-4′ ]
 [/column]
[/column]
[column size=’col-md-8′ ]
Bibtex:
@inproceedings{HernandezBMVC17,
author={Daniel Hernandez-Juarez and Lukas Schneider and Antonio Espinosa and David Vazquez and Antonio Lopez and Uwe Franke and Marc Pollefeys and Juan Carlos Moure},
title={ Slanted Stixels: Representing San Francisco’s Steepest Streets},
booktitle=BMVC,
year={2017}
}
[/column][/row]